
OTONOM ROBOT İLE HASAT SEÇİMİ
AvL Motion, Turck'un RFID ve fieldbus teknolojisinin yanı sıra yüksek hassasiyetli sensörlerle 'süslenmiş' beyaz kuşkonmazın seçici hasadı için bir makine ile çığır açıyor
Hollandalı başlangıç şirketi AvL Motion, beyaz kuşkonmazın tamamen otonom seçici hasadı için bir makineyi piyasaya sürdü. Şirket, yükseklik kontrolü için ultrasonik sensör arayışında Turck'un IO-Link uyumlu RU40U'suna rastladı. Bu işbirliği sayesinde, minyatür endüktif yaklaşım sensörleri, hassas kodlayıcılar ve Banner Engineering'den LE550 lazer sensörleri ve sağlam Li500-Q25 lineer konum sensörü dahil olmak üzere araca daha fazla sensör teknolojisi entegre edildi. AvL ayrıca hasat modüllerinin tanımlanması için TN-Q14 RFID okuma/yazma kafasını kullanırken, TBEN-S2-4IOL kompakt I/O modülü IO-Link sinyallerini PLC'ye aktarır.
-turck-image.jpg)
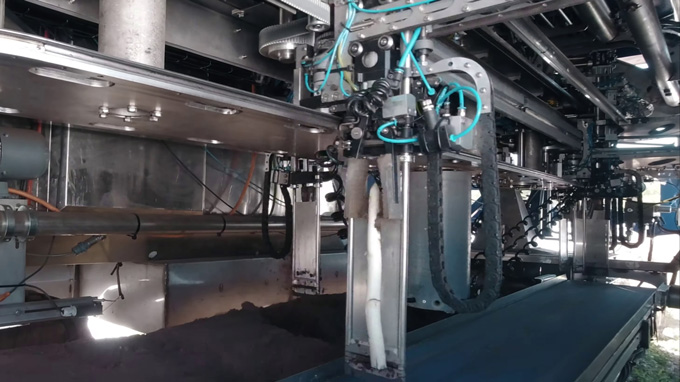
AvL Compact S1560 kuşkonmaz mızraklarını otomatik olarak topraktan çeker

Makinede altı ila on iki hasat modülü bulunur

AvL'nin kurucusu Arno van Lankveld, Turck'un IO-Link ultrasonik sensörü RU40U'yu kullanıyor

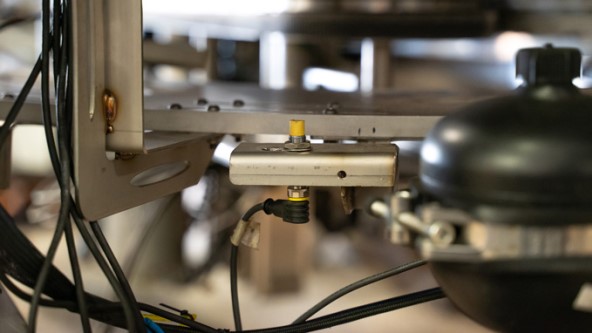
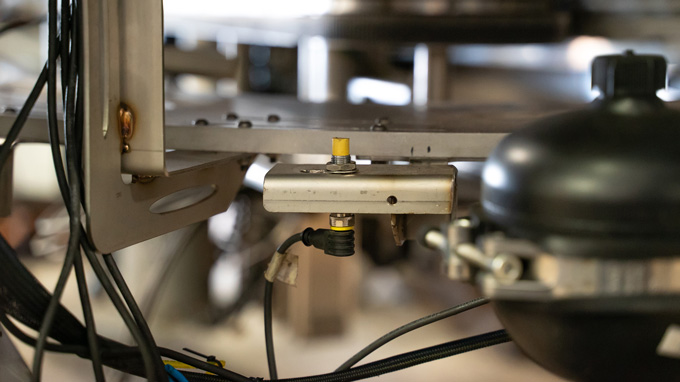
Sağlam tasarımı sayesinde Li500-Q25 sensörü, ön aksın dışına da takılabilir

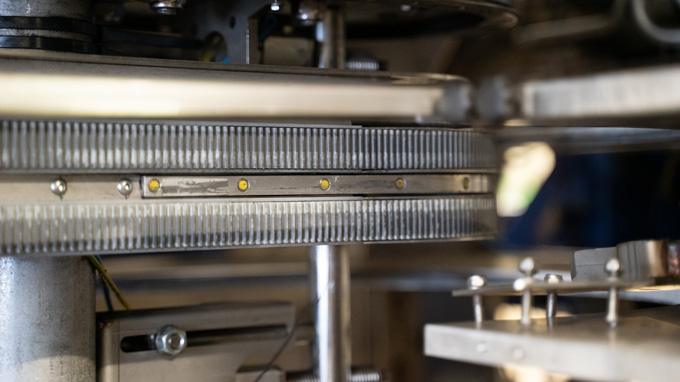
Tampon alanındaki BI3-M08K minyatür sensörler, hasat kasetlerinin sayısını algılar
Bir kaset NI10U-M12'yi geçtiğinde, PLC bir hasat işlemi için zamanlayıcıyı başlatır

Turck kodlayıcılar, bir toplama modülünün şu anda arabelleğin hangi konumunda mevcut olduğunu bildirir

Sürücü platformunda, bir işçi kuşkonmazı kutulara koyar ve hasat makinesini kontrol eder.

TBEN-S2-4IOL çok protokollü cihaz, sensörler ve PLC arasında bir arayüz olarak kullanılır.
-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
IO-Link'li ultrasonik sensör aracılığıyla yükseklik kontrolü
AvL Motion, kuşkonmaz yatağı ile makinenin pnömatik olarak kontrol edilen dahili çerçevesi arasındaki mesafeyi ölçmek için IO-Link'li iki ultrasonik sensör RU40U kullanır. Kısmen tozlu veya yağmurla kaygan zemine rağmen, sensörler, kullanıcıların bir HMI'da ayarlayabileceği sabit bir yükseklik ölçümü sağlar. “Turck, ürünlerinin olağanüstü kalitesi ve hızlı teslimatı ile bizi etkiledi. AvL CEO'su Arno van Lankveld, bu nedenle diğer bileşenler için üreticiyle birlikte kaldık" diyor.
Optik süreç eğitimli gözün yerini alıyor
AvL Compact S1560'ın hasat süreci çok dinamiktir. Makine yerleştirilip harekete geçirildikten sonra toprağın yüzeyi taranır. Bir kuşkonmaz ucunun kesin konumu, ek bir optik işlemle birlikte lazer sensörlerin kullanımıyla ana kontrolör tarafından algılanır. Değişken sayıda hasat modülü, süreç içinde robotun içinde dairesel bir iz etrafında hareket eder. Şu anda bu, yaklaşık 25 santimetre yüksekliğindeki kasetlerin on ikisinden oluşuyor. Robotun hızına göre ayarlanırlar ve tüm yerleştirme, kesme ve kavrama sürecini kontrol ederler.
Hedef ve hasat modülü arasında ince ayar
Kontrolör, hasat sürecine ince ayar yapmak için yalnızca seçilen kuşkonmaz mızraklarının koordinatlarına ihtiyaç duymaz, aynı zamanda modüllerin konumu ve hareketi hakkında sürekli bir bilgi akışına da ihtiyaç duyar. Bu, şu anda tamponda kaç tane kaset bulunduğunun, yani kaçının park konumunda olduğunu ve şu anda devrede bir kuşkonmaz sürgünü tespit edenlerin sorgulanmasıyla başlar. Bunun için AvL, küçük BI3-M08K endüktif sensörlerini kullanır. Hasat modüllerinin tam olarak tanımlanması, her kasetin ayrı kodunu okuyan TN-Q14 HF okuma/yazma kafası kullanılarak RFID ile gerçekleştirilir. Buna bir döner kodlayıcı tarafından sağlanan konum tespiti de eklenir.Kontrol üniteleri ses fonksiyonlu sinyal lambaları ile donatılmıştır, böylece sistem akustik uyarı sinyalleri de verebilir.
Hedef Endüktif sensör bir zamanlayıcıyı tetikler
Bir hasat makinesi devresini başlattığında bu, PLC'deki hasat işlemi için zamanlayıcının çalışmasını ayarlayan NI10U-M12 tipi bir uprox endüktif sensörden geçer. Kuşkonmaz mızrakları düzenli sıralarda büyümediğinden, hasat modülleri dairesel parkur etrafındaki hareketlerine ek olarak sola veya sağa da hareket edebilir. Bu, basınçlı hava ile çalıştırılır ve bu nedenle her zaman saniyenin birkaç onda biri kadar geciktirilir. Yine de kasetlerin doğru hizalanmasını sağlamak için PLC, Turck'un global ortağı Banner Engineering'den LE550 lazer sensörleriyle ölçülen modüllerin ilk ve hedef konumu arasındaki mesafe hakkında bilgi alır.
Joystick ile dönüş manevrası
Operatörler, hasat makinesinin hızını ve hidrostatik direksiyonunu kontrol etmek için harici bir kontrol modülü kullanır. İki Turck kodlayıcı tekerlek dönüşlerini ölçer; AvL, tekerlek konumunu ölçmek için endüktif bir doğrusal konum sensörü kullanır. Bunun için LI500-Q25 sensörünün konumlandırma elemanı, direksiyon silindirinin pistonuyla bağlantılıdır. Bu şekilde, ana kontrolör tek bir değer kullanarak her iki tekerleğin açısını hesaplar ve operatörler makineyi bir joystick ile kolayca çevirebilir. Yarışmanın sunduğu modellerin aksine, çiftçiler AvL Compact S1560'ı bir traktöre bağlamak zorunda değiller.
Daha fazla bilgi
- Bu ürün hakkında daha fazla bilgi [PDF, MB]
- Video (YouTube): Tam Otonom Beyaz Kuşkonmaz Hasat Robotu
- Bir bakışta: Sayısız Endüstriyel Uygulama için Enkoder Portföyü
- Ürüne Bağlantı: Ultrasonik Sensör RU40U-M18E-LIU2PN8X2T-H1151
- Ürüne Bağlantı: Endüktif Sensör BI3-M08K-AP6X-V1131
- Ürüne Bağlantı: Endüktif Sensör NI10U-M12-AP6X-H1141
- Ürüne Bağlantı: Endüktif Doğrusal Konum Sensörü LI500P0-Q25LM0-LIU5X3-H1151
- Ürüne Bağlantı: Fotoelektrik Sensör LE550IQ
- Ürüne Bağlantı: IO-Link LE550KQ ile Fotoelektrik Sensör
- Ürüne Bağlantı: HF-RFID Okuma/Yazma Kafası TN-Q14-0.15-RS4.47T
- Ürüne Bağlantı: Kompakt Çok Protokollü I/O Modülü TBEN-S2-4IOL
- Tüm Makaleyi İndir [PDF, 1,31 MB]
- OTOMOTİV
- Entegre Akım İzlemeli Kablo, Konveyör Sisteminin Enerji Kesilmelerini Önler
- Endüktif Kuplörler Hassas Malzeme Taşınmasını Sağlar
- Doğrudan MES Bağlantısı İle Montaj Yönetimi
- Otomobil Üretiminde Gövde Algılama
- Otomotiv Üretiminde Güvenilir Kızak Tespiti
- Tamponlar İçin Hatasız JIS Sipariş Toplama
- Akü Üretiminde Lazer Sensör İle Metal Parlak Silindirleri Algılama
- RFID Bus Modu Lityum-İyon Pillerin Kalitesini Olmasını Sağlar
- Daldırmalı Kaplama Hattında Seviye Ölçümü
- Merkezi Yağlama Sisteminde Seviye Kontrolü
- Tutkallama Robotunda Kalite Güvencesi
- Eğim Ölçer Platform Hizalanmasını Hızlandırır
- Paralel Durum İzlemeli Motor Kontrolü
- IP67 Hybrid Modül İle Gripper Üzerindeki Emniyet Sinyallerinin Kontrolü
- Soğutma İstasyonlarının RFID Teknolojisi ve Dağıtılmış Otomasyon İle İzlenmesi
- Ethernet Altyapısı İle Birbirine Bağlanan Robot Kaynak Hücreleri
- Kaynak Kelepçelerinde Soğutma Devresi İzleme
- Tambur Yıkama Makinelerinde Akış İzleme
- Sac Kalınlık Ölçümü
- İyileştirme Projesi Olarak Motor Durumlarının İzlenmesi
- CNC Tezgahlarında Soğutma Yağlarını Kolayce İzleyin
- Levha Kalınlık Ölçümü
- Gövde
- Boyahane
- Montaj
- Motor & Aktarma
- Robotik Hücreler İçin Alan Koruma
- UHF RFID İle Ürün-Seviye Tespiti
- Makinalarda Soğutma Yağının İzlenmesi
- Basınç Tesislerinde Hidrolik Basıncın Kontrol Edilmesi
- Makine Kaldırma Süreçlerinde Ölçme Basıncı
- Otomotivde Kaynak Ucu Tespiti
- Manuel Yük Hücresinde Kaynak
- Son Montaj - Siyah Kapı Paneli Üzerindeki Siyah Parçaların Tespiti
- Son Montaj - Açılır Otomobil Tavanlarında Şeffaf Cam Tespiti
- Son Montaj - Otomotiv Montaj Hattında Uzun Menzilli Algılama
- Güç Aktarma Hatları - Motor Blok Üzerinde Lastik Pul Tespiti
- Güç Aktarma - Motor Blok Pozisyon Kontrolü
- Elektrikli Araç Algılama
- Self Servis Araç Yıkamada Araç Algılama
- BAŞARI HİKAYELERİ
- Esnek ve Verimli Üretim İçin Modüler Tesis
- Lazer Sensör, Montaj Hücresindeki Siyah Tamponları Algılar
- Modüler Üretim İçin Dağıtılmış Emniyet Teknolojisi
- Modüler Konveyör Sistemi
- Aletlerin Güvenli Değişimi İçin RFID ve I/O Modülleri
- Süspansiyon Üretiminde AGV İle RFID Kullanımı
- IO-Link İle Susturucu Üretimi
- Arka Havalandırma Üretiminde İşparçası Taşıyıcısının Tanımlanması
- Kaynak Somunu Algılama
- RFID ile İzlenebilirlik
- Motor Üretiminde RFID
- RFID Tanımlama ile Tampon Üretimi
- Boya Atölyeleri için Çözümler
- Kaynak ve Montaj Sensörleri
- Montaj Sistemleri için Açı Sensörleri
- Parça Tanıma
- Pick-To-Light Kokpit Üretimini İyileştirir
- Enjektör Nozullarının RFID ile Tanımlanması
- Araç Gövdesi Üretiminde RFID
- IO-Link Diferansiyel Dişlisi Üretimini Kolaylaştırıyor
- KİMYA
- Excom IO Sistemi, Hidrojenin Güvenli Bir Şekilde Sıvılaştırılmasını Sağlar
- Ex Alanlarında Merkezi Olmayan Otomasyon
- Ex Alanındaki Boru Bağlantılarının RFID Kontrolü
- I&C Odasında Yer Tasarrufu Ethernet Sinyal Bağlantısı
- Tehlikeli Bölgedeki Modüler Kızakların Ethernet Tabanlı Otomasyonu
- Modüler Proses Tesislerinde Ex İzolasyon
- Demirlerin Tespiti
- Uzak I/O Sinyalleri
- Saha Ekipmanlarının Kolay Bağlantısı
- Kontrol Kabin Sistemlerinde I/O ile Sinyal İşleme
- Kontrol Kabininde Arayüz Teknolojisi ile Sinyal Ayırma
- Hortum Bağlantılarının Tanımlanması
- Sahadaki Panoların Verimli İzlenmesi
- Çeyrek Turlu Aktüatörlerin İzlenmesi
- Sistem Çözümlerinin Planlanması ve Montajı
- BAŞARI HİKAYELERİ
- Control Cabinet Monitor for Transmission of Condition Data
- Turck'un FS+ Akış Sensörleri ile Endüstriyel Fırınların Verimli Soğutulması
- EXCOM I/O Sistemi Kontrol Odalarınızda Yer Açıyor!
- Zone 2 ve Zone 22'de RFID
- Verimli Test Kontrolü
- Excom İle Güvenli Sistemler
- Proses Kontrol Sistemi Ortaklığı
- Riskli Bölge için Uzak I/O
- Çift Klapeli Vanalarda Konum Bilgisi Alma
- Fieldbus ile Esneklik
- Uzak I/O ile Varlık Yönetimi
- Karbür Üretiminde RFID İle Doğru Konumlandırma
- Kompakt Ex Koruma
- ENERJİ
- Gıda ve İçecek
- RFID Takibi Dondurma Üretiminde Gıda İsrafını Azaltır
- Durum İzleme Sensörü Otomatik Klima Kontrolü
- Kontrol Kabinlerinin Durum İzlenmesi
- Depo Odalarında Durum İzleme
- Rulo Makinalarında Hamur Kalınlığı Kontrolü
- Gıda Konteynerlerinin Tanımlanması
- Kapların Kontrolü
- Terminal Bağlantısı ile Sensörlerin Hızlı Değişimi
- Boru Dirseklerinin Tespiti
- Çikolata Kalıplarının Tanımlanması
- BAŞARI HİKAYELERİ
- Buhar Jeneratörleri için Bulut Tabanlı Bakım
- RFID Desteği Gıda Üretiminde Takip ve İzlemeyi Sağlar
- Atex Zone 22'de Güvenilir Doğrusal Konum Tespiti
- Soğuk Depolarda IP67 PLC ile Kontrol
- RFID ile Et Üretiminde Takip ve İzleme
- Patates Üretiminde Temassız Encoder
- Gıda Dağıtım Merkezinde UHF RFID
- Çikolata Üretimi için RFID
- Gıda Ekipmanları İçin Dağıtılmış I/O
- İçki Fabrikaları için Uzak I/O Çözümleri
- RFID ve Otoklavlar
- Çikolata Üretiminde Şeffaflık
- Konveyörler için IP67 Güç Kaynakları
- RFID ile Artan Üretim Şeffaflığı
- Kamera İle Şişe Algılama
- Çok Şeritli Bir Konveyörde Soğutulmuş Ruloları Algılama
- Lojistik
- Monitoring Cooling and Lubrication Circuits in CNC Machines
- Preventing Package Jams in the Logistics Center
- Height Control and 3D Spatial Monitoring on Autonomous Forklift Trucks
- Konveyör Modüllerinin Dağıtılmış Otomasyon ile Kontrolü
- Büyük Torbaların RFID İle Kontrolü
- Konteyner Vinçlerde Mesaefe Algılama
- Korunan Alanlar İçin Geçiş Kontrolü
- Elektro-duyarlı Koruyucu Ekipmanın Dağıtılmış Otomasyonu
- Rulolu Konveyör Kontrol Modülleri
- Konteyner Kontrolü
- Depo Kapılarında Hızlı Etiket Algılama
- UHF RFID İle Ürün Seviye Tespiti
- Konveyör Bantlarda Kestirimci Bakım
- Taşıma Konteynerlerinin Tespiti
- Kaplarda Seviye Tespiti
- Kriyojenik Konteynırların Tanımlanması
- El Cihazları İle Mobil Konteynerlerin Tanımlanması
- Gıda Kaplarının Tanımlanması
- Tier 1 – Planlı Tampon Tanımlaması
- Depo Odalarında Durum İzleme
- İstifleme Araçlarında Çarpışma Önleme
- BAŞARI HİKAYELERİ
- Sustainable Tracking of RTIs thanks to RFID
- HF Veri Yolu Modlu RFID, Tohum Depolamayı Kolaylaştırır
- Pick-by-Light Manuel Lojistiği Yüzde 60'ın Üzerinde Hızlandırıyor
- Pick-by-light Çözümü Montal Süreçlerini Kolaylaştırır
- RFID, Büyük Şantiyede İnsansız Mağazaya İmkan Sağlıyor
- G/Ç ve Güvenlik Modülleri İç Lojistikte Verimi Artırır
- Ham Madde Sevkiyat Takibi
- Yükleme Hatasını En Aza İndirmek İçin RFID Tabanlı İzleme Çözümü
- RFID Tabanlı Takip OG Giriş ve Giden Malzemeler
- Dağıtılmış Otomasyon İle UHF RFID Çözümü
- Patates Üretiminde Temassız Enkoder
- Soğuk Hava Depolarında IP67 PLC Çözümü
- Radar Sensörü QT50 İle Hız Kontrolü
- Konveyörler İçin IP67 Güç Kaynakları
- Modüler Konveyör Sistemi
- Depo İçin RFID Çözümü
- Süspansiyon Üretiminde AGV İle RFID Kullanımı
- RFID İlaçları Tanımlar
- Gıda Dağıtım Merkezinde UHF RFID
- Kamyonlar İçin Otonom Park Yardımı
- MOBİL UYGULAMALAR
- Animal and Object Detection on the Combine Harvester
- Durum İzleme Sensörü Otomatik Klima Kontrolü
- Otomatik Eğim Dengeleme
- Tarla Püskürteçleri İçin Dağıtım Hatları
- Tarla Pulverizatöründe Açı Ölçümü
- Biçerdöverlerde Malzeme Akışı İzleme
- Vinç Kollarında Açı Ölçümü
- Yangın Motorlarında Ekipman Bölüm Aydınlatması
- Biçerdöverlerde İki Eksenli Eğim Ölçümü
- İstifleme Uygulamalarında Çarpışma Önleme
- BAŞARI HİKAYELERİ
- Otomobil Üretiminde Akıllı Forkliftler İle RFID Çözümü
- Sulama ve Drenaj Pompalarının Güvenli Uzaktan Bakımı
- RFID Sistemi İle Erişim Kontrolü
- Otonom Robot İle Hasat Seçimi
- RFID ve Enkoder ile Pozisyon Ölçümü
- Radar Sensörü QT50 İle Hız Kontrolü
- Süspansiyon Üretiminde AGV İle RFID Kullanımı
- Süper Yat Üzerindeki Blok I/O Modülleri
- Tarak Gemilerinde Temassız Enkoder
- Toz Toplama İçin Uzak I/O
- Kabin Soğutma
- Hızlı Bağlantı Kesme
- Aşırı Soğuk için Otomasyon Çözümleri
- Vinçler için Uzak I/O
- Sağlam Ağır Metal Kaldırma
- Rollercoaster Konumlandırma
- Gelecek İçin Üretim
- Hatasız Yükseklik Ölçümü
- Kritik Açı Algılama
- Açı Sensörü Platform Kaldırmasını Algılar
- Petrol ve Gaz
- Paketleme
- Dağıtılmış Otomasyon İle Paket Doğrulama
- Renkli Kartuşların RFID İle Tanımlanması
- Makinelerin Güvenilir Çalışması
- Konteyner Kontrolü
- Dolum Hatlarında Kapakların İzlenmesi
- Değişim Süreçlerinin İzlenmesi
- Test Şişelerinin Tanımlanması
- Granül Kahve Seviye İzleme
- Kaplarda Seviye Tespiti
- Taşıma Konteynerlerinin Tespiti
- BAŞARI HİKAYELERİ
- İlaç
- RFID İle Uçtan Uca Numune Takibi
- Patlayıcı Alanlarda Tüp Bağlantılarının RFID Kontrolü
- Dağıtılmış RFID Paketi Doğrulaması
- Modüler Skidlerin Ethernet Tabanlı Otomasyonu
- Dağıtılmış I/O Teknolojisine Sahip İlaç Skidleri
- Ex Alanlarda Dağıtılmış Otomasyon
- Vana Arayüzlerinin Merkezi Kontrolü
- Çeyrek Dönüş Aktüatörlerinin İzlenmesi
- Boru Dirseklerinin Algılaması
- Uzak I/O Sinyalleri
- Bağlantı Kutuları İle Skidlerin Planlaması
- Saha Cihazlarının Kolay Bağlantısı
- Kroyejenik Konteynerların Tanımlanması
- Mobil Konteynerlerin Tanımlanması
- El Terminali İle Mobil Konteynerlerin Tanımlanması
- Hortum Bağlantılarının Tanımlanması
- Steril Alanlarda Hortum Bağlantılarının Tanımlanması
- Ex Zone 1'deki Hortum Bağlantılarının Belirlenmesi
- Büyük Torbaların ve Biyoreaktörlerin Tanımlanması
- Tek Kullanımlık Ürünlerin Uygulamlarında Tanımlama
- BAŞARI HİKAYELERİ
- Yarıiletken
- Parça Tanımlayıcıların Yüksek Hassasiyette Tespiti
- Küçük IC Çiplerinin Hızlı Tespiti
- Bir Parça Üzerinde İki Barkod Kontrolü
- Kompakt Güvenlik Kontrolü
- Küçük Erişim Noktalarını Daha Güvenli Hale Getirmek
- PCB Montajında Yapışkan Algılama
- Mobil Sektöründe Elektronik Komponentlerinin Detaylı Tespiti
- Banta Yüklenen Devre Çipleri İçin Hata Tespiti
- Yuvalara Oturmuş IC Yongalarının Varlığı ve Yönü
- Hard Disk Algılama
- Işıklı Ürün Montaj İstasyonu
- Yarı İletken İmalatı Sırasında LED Durum Gösterimi
- Küçük Erişim Noktalarını Daha Güvenli Yapmak
- BAŞARI HİKAYELERİ
Select Country
Turck worldwide